




Regolazione proporzionale + integrale + derivativa
Processi con notevole ritardo cinematico (ritardo dovuto alle distanze di installazione fra elemento sensibile ed elemento finale di regolazione), sono talvolta di difficile regolazione anche utilizzando l'azione proporzionale integrale: per evitare oscillazioni di tutto il sistema si dovrebbe adottare bande proporzionali ampie ed azioni integrali molto ridotte.
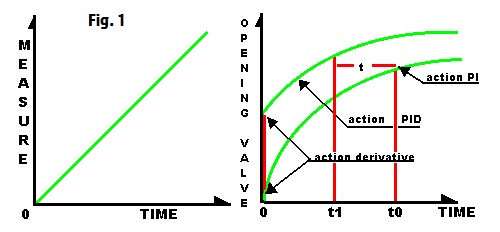 |
Ma questo comporterebbe, ad ogni variazione di carico, scostamenti di notevole entità assorbibili in un periodo di tempo troppo lungo. Su tali processi, dove sovente si trova come variabile una temperatura, l'aggiunta dell'azione derivativa alla proporzionale integrale abitualmente risolve il problema. L'azione derivativa provoca, a seguito di uno scostamento della variabile dal "setpoint", una correzione inizialmente maggiore nella posizione dell'elemento finale di controllo: in un primo momento viene spostato di più di quanto non lo sarebbe con la sola Regolazione P o PI (Fig. 1).
|
|
Col tempo, questo eccesso di correzione viene assorbito progressivamente dal regolatore, il quale poi esplicherà la sua azione PI. Il risultato consiste nell'ottenere, al manifestarsi di uno scostamento della variabile dal "setpoint", una immediata e maggior correzione che si aggiunge a quella normale, in modo da provocare una variazione momentanea dell'agente di controllo che compensi il ritardo del processo. Riassumendo, la regolazione di tipo PID produce una variazione nella posizione dell'elemento finale di controllo che è proporzionale a:
Il vantaggio più evidente nell'impiego dell'azione derivativa è quindi quello per cui la variabile rimane lontana dal valore di "set" per un tempo inferiore. |
|